











OstBridge 6JM Dreiphasen-Synchron-Servomotoren – Hochdynamische Motoren aus chinesischer Fertigung
 OstBridge-Katalog der in China hergestellten dreiphasigen Synchron-Servomotoren der Baureihe 6JM
OstBridge-Katalog der in China hergestellten dreiphasigen Synchron-Servomotoren der Baureihe 6JMDie dreiphasigen Synchron-Servomotoren der Baureihe OstBridge 6JM wurden für anspruchsvolle Anwendungen entwickelt, bei denen höchste Positioniergenauigkeit, Maschinendynamik oder ein vordefiniertes Drehmomentverhalten gefordert sind. Sie finden breite Anwendung in Branchen wie der Kunststoff-, Textil-, Roboter-, Energie-, Druck-, Verpackungs-, Metall-, Lebensmittel- und Getränke- sowie Papierindustrie.
Komplettlösungen aus einer Hand – dafür sind die passenden Komponenten und die richtige Konfiguration für unterschiedliche Anwendungen erforderlich. Das Portfolio der dreiphasigen Synchron-Servomotoren der Baureihe 6JM bietet eine sehr gute Skalierbarkeit und ermöglicht es somit, Anforderungen wie die Reduzierung der Teilevielfalt und die Minimierung des Wartungsaufwands problemlos zu erfüllen.
Produktportfolio:
- Hochdynamische Synchron-Servomotoren (6JM)
- Synchron-Servomotoren mit großer Massenträgheit (6JMR)
- Direkt angetriebene Synchron-Servomotoren (6JMD)
Hohe Effizienz und dynamische Leistung
Hochwertige Fertigungsmaschinen benötigen Servomotoren mit hoher Dynamik. Das bedeutet, dass die Motoren nicht nur hohe Nenndrehzahlen, sondern auch ein extrem niedriges Trägheitsmoment aufweisen müssen. Mit ihrer langen und schlanken Form,
6JM-Motoren sind idealsehr gut geeignet für diese Arten von Anwendungen. Darüber hinaus gewährleistet die konventionelle Luftkühlung eine einfache Integration in alle Motortypen.
Allgemeine Beschreibung
Die Baureihe 6JM steht für Permanentmagnet-Servomotoren. Sie sind sehr kompakt und leicht und werden in Anwendungen eingesetzt, die hohe Dynamik und präzise Positionierung erfordern. Die wichtigsten Merkmale sind nachfolgend zusammengefasst.
- Permanentmagnete mit NdFeB
- Sinusförmiger EnDat-Encoder oder -Resolver als Rückkopplungseinheit
- Dreiphasenwicklung mit Sternschaltung
- Kompakte Bauweise und geringes Gewicht
- Minimales Trägheitsmoment und hervorragendes dynamisches Verhalten
- Hohe Überlastfähigkeit/Spitzendrehmoment
- Geringe Drehmomentwelligkeit
- Hohes dynamisches Drehmoment bei hohen Drehzahlen
- Lange Lebensdauer, alle Motorteile außer den Lagern sind verschleißfrei.
- Direkte Ableitung der im Stator erzeugten Verlustleistung über das Gehäuse zum Flansch
- Vormontierte Rillenkugellager, die beidseitig abgedichtet und gefettet sind
- Skalierbare Motortypen mit Blockiermomenten von 0.75 Nm bis 390 Nm
- Anschluss mittels zweier hochwertiger Rundstecker
- Chip mit integrierten Parametern

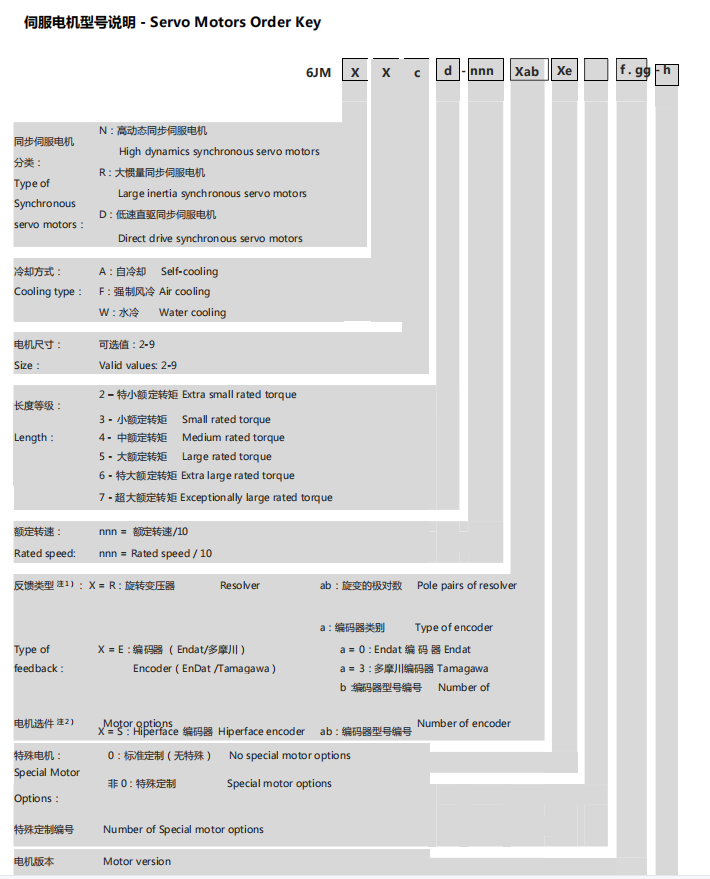
Bestellschlüssel für Servomotoren
Anmerkung 1): Art des Feedbacks
Die dreiphasigen Synchronmotoren der Baureihe 6JM sind sowohl mit EnDat- als auch mit Hiperface-Encodern und Resolvern erhältlich.
EnDat-Encoder
EnDat ist ein Standardprodukt der Johannes Heidenhain GmbH, das die Vorteile der absoluten und inkrementellen Positionsmessung vereint und über einen integrierten Lese-/Schreib-Parameterspeicher für die absolute Positionsmessung verfügt (die absolute Position wird kontinuierlich erfasst). In der Regel ist keine Referenzfahrt erforderlich. Bei Bedarf wird ein Mehrumdrehungsgeber (4096 Umdrehungen) eingesetzt. Aus Kostengründen kann auch ein Einumdrehungsgeber mit Referenzschalter verwendet werden. In diesem Fall ist die Referenzfahrt notwendig. Dank des sinusförmigen Inkrementalsignals und der hohen Auflösung des EnDat-Moduls wird selbst bei mittleren Signalfrequenzen eine sehr hohe Positioniergenauigkeit erreicht.
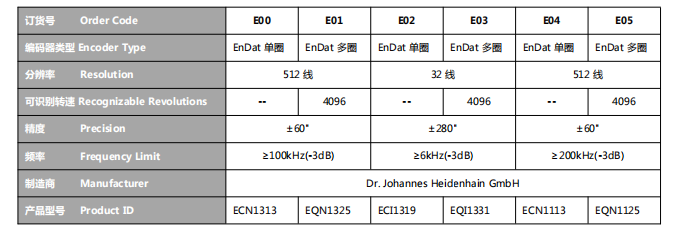
Technische Daten
Je nach Anforderungen können verschiedene Arten von EnDat-Encodern verwendet werden:
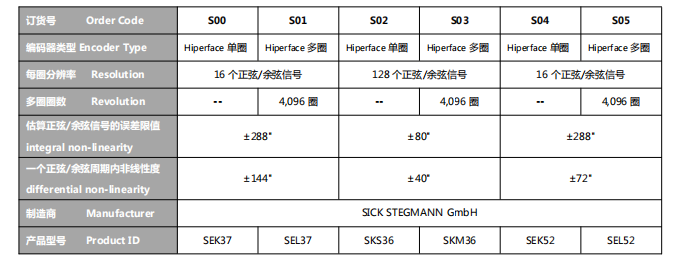
Hiperface-Encoder
HIPERFACE ist eine innovative Universalschnittstelle der SICK STEGMANN GMBH. HIPERFACE®: Für alle Anwendungen wird nur eine Schnittstelle am Antrieb benötigt, und es ist nur ein einziger Signalkabeltyp zwischen Antrieb und Rückmeldesystem erforderlich.
Die Motorrückmeldesysteme von HIPERFACE® kombinieren Inkremental- und Absolutwertgeber und vereinen so die Vorteile beider Gebertypen. Der Absolutwert wird zunächst nur beim Einschalten des Geräts erfasst und über die busfähige RS-485-Parameterschnittstelle an den externen Zähler im Regler übertragen. Ausgehend von diesem Absolutwert zählt der Regler inkrementell mit analogen Sinus-/Kosinussignalen weiter. Durch die Verwendung hochlinearer Sinus- und Kosinussignale wird die für die Drehzahlregelung erforderliche hohe Auflösung (Arctan-Bildung im Regler) erreicht. Die zu übertragenden Signalfrequenzen bleiben dabei relativ niedrig. Beispielsweise erzeugt ein Gerät mit 512 Perioden pro Umdrehung, das mit einer sehr hohen Drehzahl von 12,000 U/min arbeitet, lediglich eine Ausgangsfrequenz von 102.4 kHz, die sich problemlos über große Entfernungen übertragen lässt. HIPERFACE® benötigt nur eine Schnittstelle mit 8 Leitungen, um den Verkabelungsaufwand zu reduzieren.
Technische Daten
Je nach Anforderungen können unterschiedliche Arten von Hiperface-Encodern verwendet werden:
lösen
Diese Resolver werden mit einem einzelnen sinusförmigen Signal (Referenzsignal) gespeist und liefern als Ergebnis zwei sinusförmige Signale. Die Amplitude dieser Signale ändert sich mit der Winkelposition (Sinus- oder Kosinusform).

Anmerkung 2): Motoroptionen
Die Drehstrom-Synchronmotoren 6JM können geliefert werden:
- mit oder ohne Öldichtung
- mit oder ohne Feststellbremse
- mit glatter Welle oder mit Keilwellenverzahnung
- andere Verbindung
Weitere technische Details entnehmen Sie bitte dem beigefügten Datenblatt.
Die dreiphasigen Synchron-Servomotoren der Baureihe OstBridge 6JM zeichnen sich durch Flexibilität und hohe Dynamik aus. Wir konzentrieren uns auf Lösungen für Branchen wie Kunststoff, Textilien, Robotik, Energie, Druck, Verpackung, Metallverarbeitung, Lebensmittel und Getränke, Papier, Baustoffe und Logistik.
Unsere Drehstrom-Synchronmotoren der Baureihe OstBridge 6JM sind speziell für anspruchsvolle Projektanwendungen konzipiert. Sie finden heute Anwendung in der Konsumgüterproduktion sowie in der Kunststoff-, Verpackungs-, Metall-, Getränke- und Rohstoffverarbeitung. Die Baureihe bietet eine Komplettlösung – sie stellt je nach Anwendungsumgebung die passenden Module und Konfigurationen bereit. Die Drehstrom-Synchronmotoren der Baureihe 6JM erfüllen vielfältige Anwendungsanforderungen, wie z. B. minimale Komponentenanzahl, einfache Wartung, minimaler Leistungsbedarf und geringer Platzbedarf. Die Rückkopplungssysteme werden individuell auf Ihre Bedürfnisse zugeschnitten. Die Drehstrom-Synchronmotoren der Baureihe 6JM sind mit verschiedenen Encoder-Serien erhältlich. Standardmäßig ist ein Heidenhain-Encoder verbaut. Je nach Projektanforderung können Kunden zwischen Encodern mit Standardauflösung und hochauflösenden Encodern wählen. Beide sind als Mehrgang-Modelle verfügbar, die einen Rücksetzvorgang während des Betriebs gewährleisten. Zudem sind keine zusätzlichen Messsysteme an der Maschine erforderlich. Absolutwertgeber benötigen keine Batterien und reduzieren somit den Wartungsaufwand. Der Drehstrom-Synchronmotor verfügt über einen Resolver, wodurch die Anforderungen an Maschinengenauigkeit und Drehzahl reduziert werden. Der integrierte Parameterchip ist im Drehstrom-Synchronmotor der Serie 6JM verbaut, und alle relevanten mechanischen und elektronischen Informationen und Daten sind im Encoder gespeichert. Dadurch entfällt die Konfiguration des Servoantriebs vor Ort. Sobald der Encoder mit dem Servoantrieb verbunden und die Elektronik eingeschaltet ist, wird der Motor automatisch erkannt. Der Motor sendet dann die Nenn- und Grenzwerte an den Servoantrieb, der daraus automatisch die für einen sicheren Motorbetrieb erforderlichen Strombegrenzungs- und Motorsteuerungsparameter ableitet. Der Anwender muss lediglich die Drehzahl- und Positionsregler optimieren.