Wie wählt man den passenden Servomotor aus?
Die Automatisierungstechnik ist ein aktuelles Topthema, und Servomotoren spielen dabei eine wichtige Rolle. Sie werden üblicherweise zur präzisen Drehzahl- und Positionsregelung von Komponenten in Projekten eingesetzt. Entwickler von Automatisierungsanlagen stehen oft vor der Herausforderung, den passenden Motor für unterschiedliche Anforderungen zu finden. Die große Auswahl an Motoren mit zahlreichen Parametern, die von den Anbietern angeboten wird, kann Einsteiger schnell überfordern. Dieser Artikel basiert auf den praktischen Erfahrungen des Autors und soll hilfreiche Anregungen bieten.
1. Grundlagen der Servomotoren:
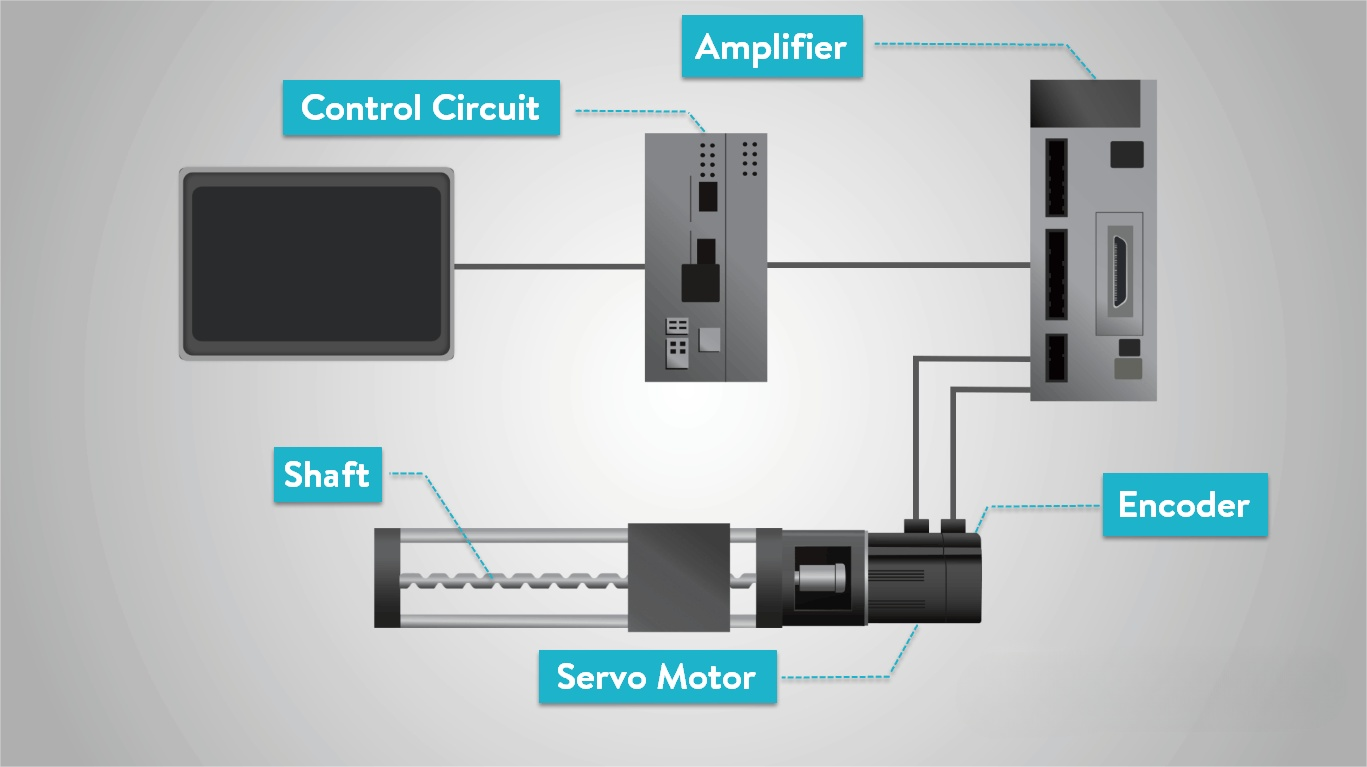
Servomotoren sind Teil eines geschlossenen Regelsystems und bestehen aus mehreren Komponenten, nämlich einer Steuerschaltung, einem Servomotor, einer Welle, einem Potentiometer, Antriebszahnrädern, einem Verstärker und entweder einem " target="_blank" rel="noopener">Encoder oder Resolver.
Ein Servomotor ist ein in sich geschlossenes elektrisches Gerät, das Teile einer Maschine mit hoher Effizienz und großer Präzision dreht.
Die Abtriebswelle dieses Motors kann in einen bestimmten Winkel, eine bestimmte Position und eine bestimmte Geschwindigkeit bewegt werden, die bei einem herkömmlichen Motor nicht möglich sind.
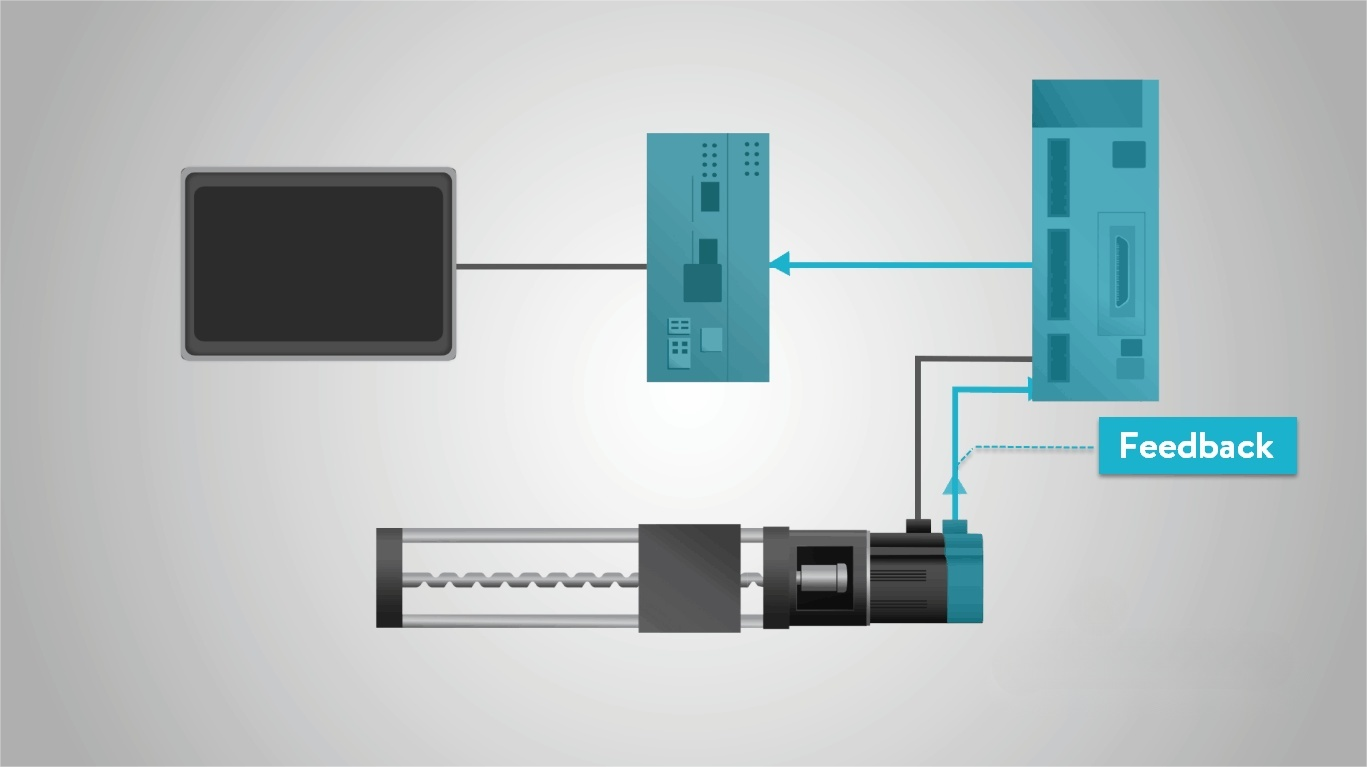
Der Servomotor nutzt einen herkömmlichen Motor und koppelt diesen mit einem Sensor zur Positionsrückmeldung.
Der Controller ist das wichtigste Bauteil des Servomotors und wurde speziell für diesen Zweck entwickelt und eingesetzt.
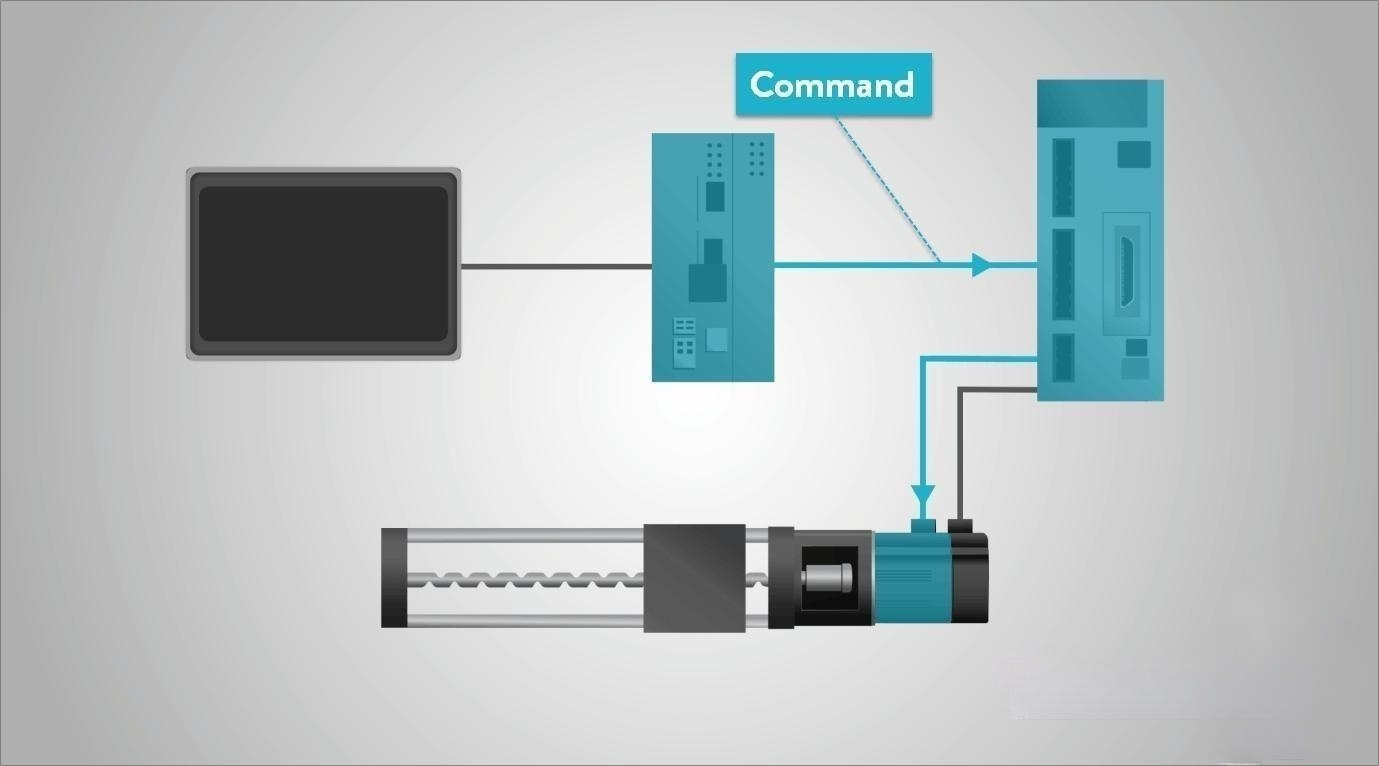
Der Servomotor ist ein geschlossener Regelkreis, der eine Positionsrückmeldung nutzt, um die Dreh- oder Lineargeschwindigkeit und -position zu steuern.
The motor is controlled with an electric signal, either analog or digital, which determines the amount of movement which represents the final command position for the shaft.
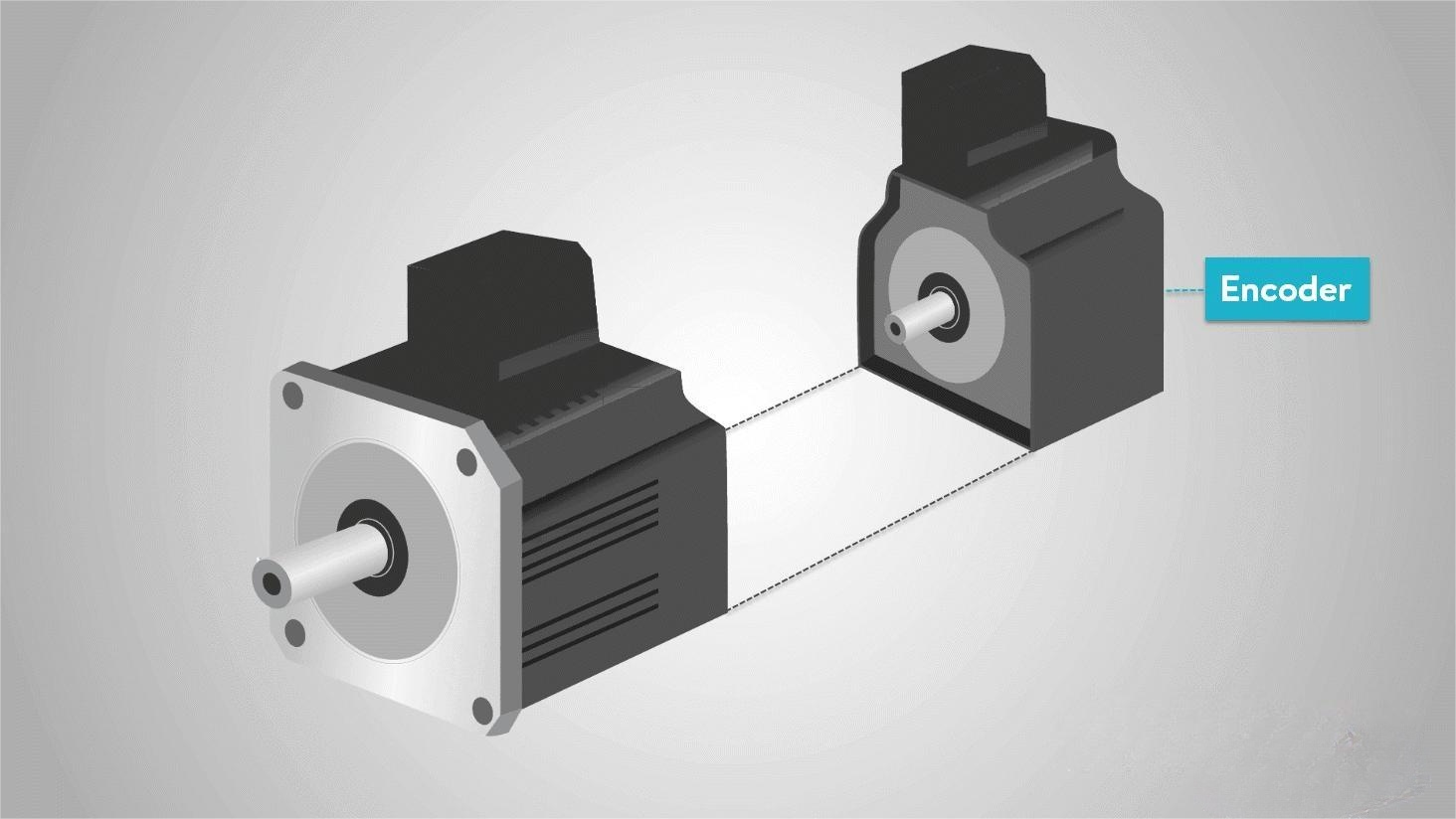
Ein Encoder dient als Sensor und liefert Rückmeldung über Drehzahl und Position. Diese Schaltung ist direkt im Motorgehäuse integriert, das üblicherweise mit einem Getriebe ausgestattet ist.
2. Arten von Servomotoren:
Types of Servo Motors are classified into different types based on their application. Bei der Bewertung von Servomotoren sind drei Hauptkriterien zu berücksichtigen:
- Zunächst einmal basierend auf ihrem aktuellen Typ – Wechselstrom oder Gleichstrom,
- zweitens zur Art der verwendeten Kommutierung, d. h. ob der Motor Bürsten verwendet,
- the third type of consideration is the motor rotating field, the rotor, whether the rotation is synchronous or asynchronous.
3. Anwendungen von Servomotoren:
Servomotoren finden breite Anwendung in verschiedenen Industrie- und Automatisierungsbereichen, in denen eine präzise Bewegungssteuerung erforderlich ist. Ihre Fähigkeit zur genauen Positions-, Geschwindigkeits- und Drehmomentregelung macht sie für ein breites Aufgabenspektrum geeignet. Hier einige gängige Anwendungsgebiete von Servomotoren:
-
Robotik: Servomotoren werden in Robotersystemen häufig eingesetzt, um Robotergelenke, Greifer und Endeffektoren präzise und gleichmäßig zu bewegen. Sie ermöglichen es Robotern, komplexe Aufgaben mit hoher Genauigkeit und Wiederholbarkeit auszuführen.
-
CNC-Maschinen: Bei CNC-Maschinen (Computer Numerical Control) treiben Servomotoren die Achsen (z. B. X, Y, Z) an, um die Bewegung des Werkzeugs präzise zu steuern und so präzise Bearbeitungs- und Fertigungsvorgänge zu ermöglichen.
-
Verpackungs- und Etikettiermaschinen: Servomotoren werden in Verpackungs- und Etikettiermaschinen eingesetzt, um die Bewegung von Förderbändern, Schneidmessern und Druckköpfen präzise zu steuern.
-
Textilindustrie: Servomotoren werden in Textilmaschinen wie Webstühlen und Spinnmaschinen eingesetzt, um die Fadenspannung zu steuern und den Stoff präzise zu führen.
-
Drucken und Papierverarbeitung: In Druckmaschinen steuern Servomotoren die Papierzufuhr, die Registerhaltigkeit und die Bewegung des Druckkopfes und gewährleisten so eine präzise Ausrichtung und eine hohe Ausgabequalität.
-
Automobilindustrie: Servomotoren werden in verschiedenen Automobilanwendungen eingesetzt, unter anderem in elektrischen Servolenksystemen, Drosselklappensteuerungen und Präzisionsroboter-Montagelinien.
-
Luft- und Raumfahrt: Servomotoren werden in Flugzeugsteuerungssystemen für die präzise und zuverlässige Bewegung von Flugsteuerflächen wie Querrudern, Höhenrudern und Seitenrudern eingesetzt.
-
Medizinische Ausrüstung: In medizinischen Geräten und Anlagen werden Servomotoren zur präzisen Positionierung eingesetzt, beispielsweise in robotergestützten chirurgischen Systemen und medizinischen Bildgebungsgeräten.
-
Kamerastabilisierung: In photography and cinematography, servo motors are used in gimbals and camera stabilization systems to achieve smooth and steady shots.
-
Fördersysteme: Servomotoren steuern die Bewegung von Förderbändern in Materialhandhabungs- und Logistiksystemen und gewährleisten so eine präzise Produktpositionierung und -sortierung.
-
Industrielle Automatisierung: Servomotoren spielen eine entscheidende Rolle in verschiedenen Automatisierungsanwendungen, darunter Pick-and-Place-Operationen, Materialhandhabung und Montageprozesse.
-
Nahrungsmittel-und Getränkeindustrie: Servomotoren werden in Lebensmittelverarbeitungs- und Verpackungsmaschinen für das präzise Abfüllen, Versiegeln und Etikettieren von Lebensmitteln eingesetzt.
-
Erneuerbare Energie: Servomotoren werden in Solarnachführungssystemen und Windkraftanlagen eingesetzt, um Solarpaneele und Windkraftanlagenflügel für eine optimale Energieausbeute auszurichten.
Dies sind nur einige Beispiele dafür, wie Servomotoren in verschiedenen Branchen und Anwendungen eingesetzt werden. Ihre Fähigkeit, präzise und kontrollierte Bewegungen zu ermöglichen, macht sie zu einer unverzichtbaren Komponente moderner Automatisierungs- und Bewegungssteuerungssysteme.
Im Vergleich zu Schrittmotoren: Servomotoren
a) Der Servomotor verwendet eine Regelung im geschlossenen Regelkreis, der Schrittmotor hingegen eine Regelung im offenen Regelkreis.
b) Der Servomotor nutzt einen Drehgeber zur Genauigkeitsmessung, der Schrittmotor hingegen einen Schrittwinkel. Die Genauigkeit des ersteren kann bei herkömmlichen Produkten das Hundertfache der Genauigkeit des letzteren erreichen;
c) Die Steuerungsmethode ist ähnlich (Impuls oder Richtungssignal).
4. Energieversorgung
Servomotoren lassen sich anhand ihrer Stromversorgung in Wechselstrom-Servomotoren und Gleichstrom-Servomotoren unterteilen.
Die Auswahl zwischen den beiden Optionen ist relativ einfach. Für allgemeine Automatisierungsanlagen stellt Vertragspartner A ein standardmäßiges 380-V-Industrienetzteil oder ein 220-V-Netzteil bereit. In diesem Fall kann der passende Servomotor ausgewählt werden, um eine Spannungswandlung zu vermeiden. Einige Geräte, wie beispielsweise Shuttle-Boards und AGVs in 3D-Lagerhallen, verwenden aufgrund ihrer Mobilität meist ein integriertes Gleichstromnetzteil, weshalb hier in der Regel Gleichstrom-Servomotoren zum Einsatz kommen.
5. Bandbremse
Based on the design of the action mechanism, consider whether it will cause a reverse trend to the motor in a power outage or stationary state. If there is a reversal trend, it is necessary to choose a servo motor with a band brake.
6. Auswahlberechnung
Vor der Auswahl und Berechnung müssen zunächst die Positions- und Geschwindigkeitsanforderungen am Ende des Mechanismus ermittelt und anschließend der Getriebemechanismus bestimmt werden. Erst dann können das Servosystem und das zugehörige Getriebe ausgewählt werden.
Bei der Auswahl werden hauptsächlich folgende Parameter berücksichtigt:
6.1. Leistung und Geschwindigkeit
Berechnen Sie die erforderliche Leistung und Drehzahl des Motors anhand der Konstruktionsform sowie der Drehzahl- und Beschleunigungsanforderungen der Endlast. Es ist zu beachten, dass das Untersetzungsverhältnis des Getriebes im Allgemeinen auf die Drehzahl des gewählten Motors abgestimmt werden muss.
In the actual selection process, for example, when the load is in horizontal motion, the formula P=T * N/9549 often cannot be clearly calculated (the torque cannot be accurately calculated) due to the uncertainty of the friction coefficient and wind load coefficient of each transmission mechanism. In practice, it has also been found that the maximum power required for using servo motors is often in the acceleration and deceleration stages. So, by using T=F * R=m * a * R, the power of the required motor and the reduction ratio of the reducer can be quantitatively calculated (m: load mass; a: load acceleration; R: load rotation radius).
Folgende Punkte sind zu beachten:
a) Der Leistungsüberschusskoeffizient des Motors;
b) Berücksichtigen Sie den Übertragungswirkungsgrad des Mechanismus;
c) Ob das Eingangs- und Ausgangsdrehmoment des Getriebes den Normen entspricht und einen gewissen Sicherheitsfaktor aufweist;
d) Besteht die Möglichkeit, die Geschwindigkeit in der späteren Phase zu erhöhen?
Es ist erwähnenswert, dass in traditionellen Branchen wie der Krantechnik gewöhnliche Induktionsmotoren zum Antrieb verwendet werden und keine klaren Anforderungen an die Beschleunigung bestehen. Die Berechnung erfolgt anhand empirischer Formeln. Hinweis: Bei vertikaler Bewegung der Last ist die Erdbeschleunigung zu berücksichtigen.
6.2. Trägheitsanpassung
Um eine hochpräzise Steuerung der Last zu erreichen, muss geprüft werden, ob die Trägheit des Motors mit der des Systems übereinstimmt.
Es gibt online keine einheitliche Erklärung dafür, warum Trägheitsanpassung notwendig ist. Mein persönliches Verständnis ist begrenzt, daher werde ich es hier nicht erläutern. Interessierte können selbst recherchieren und ihre Erkenntnisse teilen. Das Prinzip der Trägheitsanpassung besteht darin, die Systemträgheit auf die Motorachse zu übertragen, wobei das Trägheitsverhältnis zum Motor nicht größer als 10 sein sollte. Je kleiner das Verhältnis, desto besser die Regelungsstabilität, allerdings wird ein größerer Motor benötigt, was die Wirtschaftlichkeit mindert. Falls Sie die genaue Berechnungsmethode nicht verstehen, empfehle ich Ihnen, sich selbstständig mit der Theoretischen Mechanik auseinanderzusetzen.
6.3. Genauigkeitsanforderungen
Prüfen Sie, ob die Regelgenauigkeit des Motors nach Änderungen am Getriebe und am Antriebsmechanismus die Lastanforderungen erfüllt. Dabei ist ein bestimmtes Rücklaufspiel von Getrieben bzw. bestimmten Antriebsmechanismen zu berücksichtigen.
6.4. Kontrollabgleich
Dieser Aspekt umfasst hauptsächlich die Kommunikation und Abstimmung mit den Elektrokonstrukteuren, beispielsweise ob die Kommunikationsmethode des Servoreglers mit der SPS kompatibel ist, um welche Art von Encoder es sich handelt und ob Daten extrahiert werden müssen.
7. Marke
Aktuell sind viele Servomotormarken auf dem Markt, deren Leistung stark variiert. Generell gilt: Wenn der Preis keine Rolle spielt, empfiehlt es sich, europäische, amerikanische und japanische Modelle zu wählen, gefolgt von Produkten aus Taiwan, China und dem chinesischen Festland. Dies ist keine Lobhudelei des Autors für ausländische Produkte, sondern eine Erfahrung aus der Praxis. Erfahrungsgemäß ist die grundlegende Leistung inländischer Servomotoren zwar ausreichend, es bestehen jedoch Defizite hinsichtlich der Steuerungsalgorithmen, der Integration und der Stabilität der zugehörigen Servoregler. Ich hoffe, die inländischen Hersteller arbeiten weiterhin intensiv daran, diesen Rückstand gegenüber ausländischen Produkten aufzuholen.
Es ist erwähnenswert, dass man bei der Automatisierungsplanung lernen sollte, externe Ressourcen zu nutzen. Gerade bei nicht standardisierten Automatisierungslösungen, wo eine Vielzahl von Geräteauswahlen und Berechnungen anfallen kann, ist dies oft unerträglich und Überstunden sind die Regel. Heutzutage bieten Servomotorhersteller technischen Support an. Solange man ihnen die Parameteranforderungen wie Last, Drehzahl und Beschleunigung mitteilt, verfügen sie über eigene Software, die automatisch bei der Berechnung und Auswahl des passenden Servomotors hilft – ein äußerst praktischer Vorteil.