Lösung für Roboterarm-Gelenkmotor-Encoder
ChatGPT-Bewertung:
Bei der Auswahl von Motor-Encodern für Roboterarmgelenke hängt die Lösung von der jeweiligen Anwendung, den Präzisionsanforderungen und der Betriebsumgebung ab. Hier finden Sie einen umfassenden Leitfaden zur Auswahl und Implementierung einer geeigneten Encoder-Lösung für Roboterarmgelenke:
1. Encodertypen für Roboterarmgelenke
- Beschreibung: Die relative Position wird als Folge von Impulsen angegeben.
- Vorteile:
- Einfach und kostengünstig.
- Hohe Auflösung und Echtzeit-Feedback.
- Nachteile:
- Erfordert einen Referenzpunkt (Referenzfahrt), um die absolute Position zu bestimmen.
- Anwendungen:
- Geeignet für Anwendungen, bei denen eine präzise absolute Positionierung nicht entscheidend ist.
b. Absolute Kodierer
- Beschreibung: Geben Sie für jeden Wellenwinkel einen eindeutigen Positionswert an.
- Vorteile:
- Macht das Zurückführen überflüssig.
- Speichert Positionsdaten auch nach Stromausfall (Varianten mit mehreren Umdrehungen).
- Nachteile:
- Teurer als Inkrementalgeber.
- Anwendungen:
- Wird in der Hochpräzisionsrobotik eingesetzt, wo die Kenntnis der absoluten Position von entscheidender Bedeutung ist, beispielsweise bei medizinischen Robotern oder Montagelinien.
c. Magnetische Encoder
- Beschreibung: Positionsbestimmung mithilfe von Magnetfeldern.
- Vorteile:
- Robust auch unter rauen Umgebungsbedingungen (Staub, Öl, Feuchtigkeit).
- Kompakt und kostengünstig.
- Nachteile:
- Etwas geringere Präzision im Vergleich zu optischen Encodern.
- Anwendungen:
- Ideal für kompakte oder robuste Roboterarme.
d. Optische Codierer
- Beschreibung: Position mithilfe von Licht und Sensoren erfassen.
- Vorteile:
- Hohe Auflösung und Genauigkeit.
- Große Auswahl an Designs und Auflösungen.
- Nachteile:
- Empfindlich gegenüber Staub und Verunreinigungen.
- Anwendungen:
- Geeignet für saubere Umgebungen, die hohe Präzision erfordern.
2. Wichtige Faktoren bei der Auswahl eines Encoders
a. Entschließung
- Definieren Sie die Anzahl der Positionsschritte, die pro Umdrehung erforderlich sind.
- Für präzise Aufgaben (z. B. medizinische Roboter oder Mikromontage) sind höhere Auflösungen erforderlich.
b. Größe und Formfaktor
- Stellen Sie sicher, dass der Encoder in die mechanische Konstruktion des Roboterarmgelenks passt.
c. Umweltresistenz
- Berücksichtigen Sie Encoder, die bestimmten Bedingungen wie Vibrationen, Staub oder Temperaturschwankungen standhalten können.
d. Kommunikationsprotokoll
- Wählen Sie einen Encoder, der Protokolle unterstützt, die mit Ihrer Motorsteuerung oder Roboterplattform kompatibel sind (z. B. SSI, CANopen oder EtherCAT).
e. Stromversorgung und -verbrauch
- Stellen Sie die Kompatibilität mit den Spannungspegeln und Leistungsbeschränkungen des Systems sicher.
3. Überlegungen zur Integration
a. Montage
- Achten Sie bei der Installation auf eine korrekte Ausrichtung, um eine Fehlausrichtung der Welle oder einen Ausfall des Encoders zu vermeiden.
- Verwenden Sie flexible Kupplungen, um geringfügige Fehlausrichtungen auszugleichen.
b. Kalibrierung
- Führen Sie eine initiale Kalibrierung durch, um die Position des Encoders mit dem Robotersystem zu synchronisieren.
c. Störfestigkeit
- Verwenden Sie abgeschirmte Kabel und eine ordnungsgemäße Erdung, um Störungen bei der Signalübertragung zu minimieren.
d. Redundanz
- Für kritische Anwendungen sollten redundante Encoder oder zusätzliche Sensoren zur Fehlertoleranz in Betracht gezogen werden.
4. Beliebte Encoder-Lösungen für Roboterarme
a. High-End-Lösungen
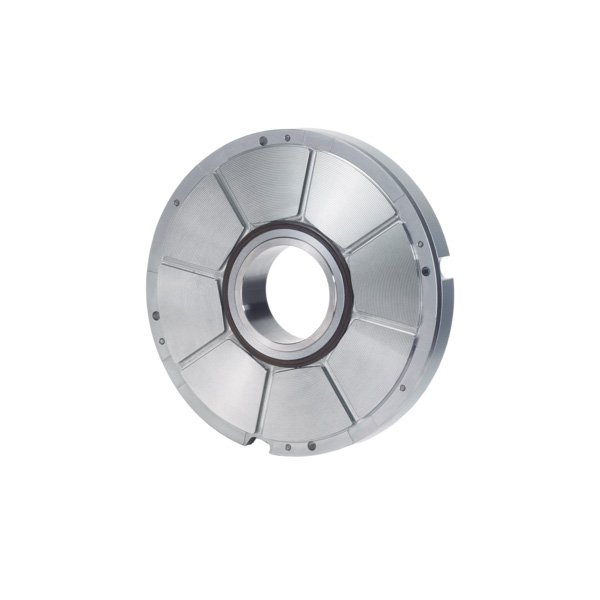
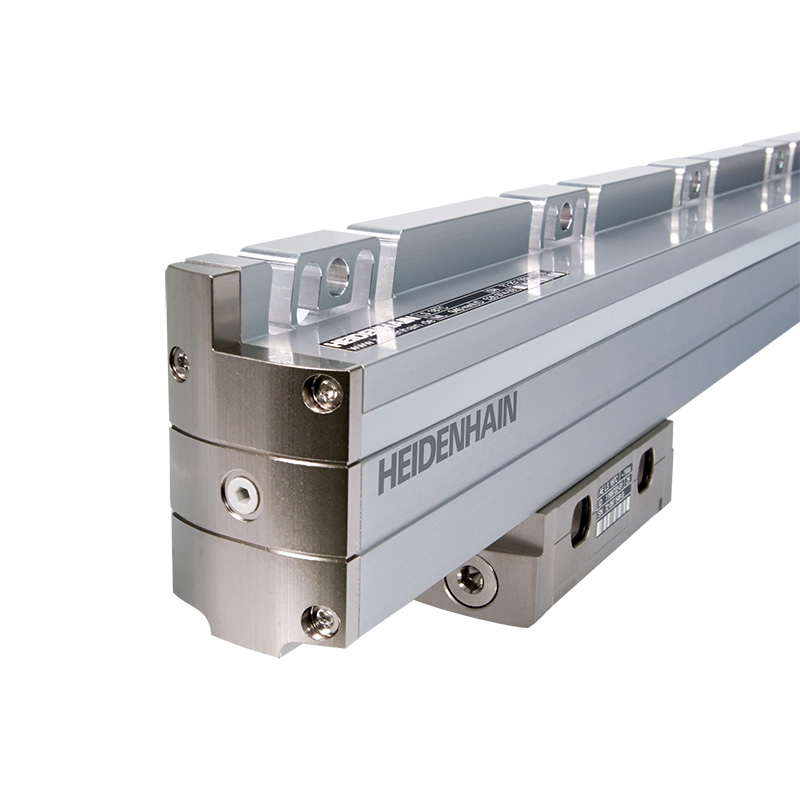
- Heidenhain-Encoder: Hochpräzise absolute und inkrementelle Encoder.
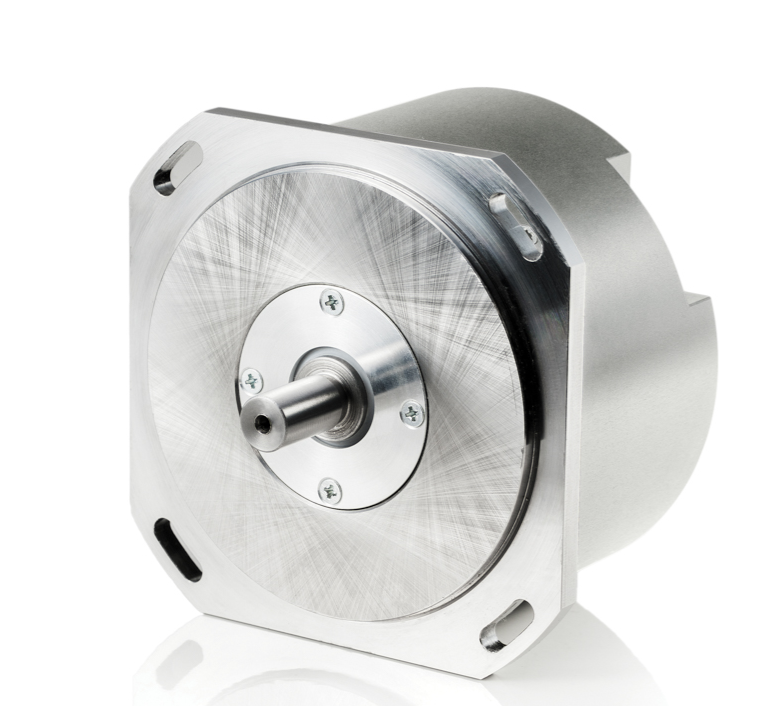
- Renishaw-Encoder: Kompakte, hochauflösende Encoder für Roboterarme.
- Kranke STE20-Serie: Absolutwertgeber mit robuster Bauweise für Industrieroboter.
b. Kostengünstige Lösungen
- AMT102-Encoder (CUI-Geräte): Modulare Encoder mit einstellbarer Auflösung.
- AS5048 Magnetischer Encoder (AMS): Kontaktloser magnetischer Encoder für robuste Anwendungen.
5. Behebung häufiger Encoderprobleme
a. Signalrauschen
- Verwenden Sie Differenzialsignalisierung und verdrillte Adernpaare zur Unterdrückung von Störungen.
b. Positionsdrift
- Kalibrieren Sie den Encoder neu und überprüfen Sie die mechanische Kopplung.
c. Probleme mit der Stromversorgung
- Prüfen Sie die Spannungsstabilität und stellen Sie sicher, dass der Encoder innerhalb der vorgegebenen Bereiche arbeitet.
d. Kommunikationsfehler
- Stellen Sie die korrekte Protokollkonfiguration sicher und überprüfen Sie die Verbindungen.
Durch die Wahl des geeigneten Encodertyps und dessen sorgfältige Integration in das Gelenk Ihres Roboterarms können Sie eine präzise und zuverlässige Motorsteuerung gewährleisten, die für die Erzielung reibungsloser und genauer Roboterbewegungen unerlässlich ist.
Ostbrücke basiert auf dem Markt in China und Europa, um unseren Kunden originelle Produkte anzubieten.
HEIDENHAIN, PRECIZIKA, SIEMENS, B & R, BOSCH REXROTH, EATON VICKERS, PARKER, Großer Lagerbestand, Mindestbestellmenge akzeptiert, schnelle Lieferung. Wenn Sie in den Bereichen Präzisionsbewegungssteuerung, elektronische Steuerung, Automatisierung und Hydrauliksysteme tätig sind, ist das OstBridge-Team die beste Wahl, um die passende Lösung für Sie zu finden.