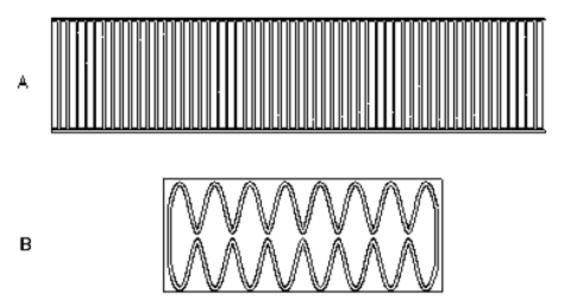
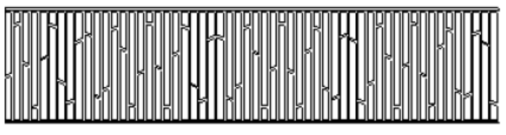
In Abbildung 1 wird der Lesekopfmodus optimiert, um den Einfluss gleichmäßiger räumlicher Abstandsänderungen im Ausgangssignal auf einen guten Kanal zu minimieren. Solche Änderungen können dazu führen, dass sich der Lesekopf entlang einer unvollkommenen mechanischen Führung bewegt. Bei der symmetrischen Auf- und Abwärtsbewegung wird die erste Auslöschung behoben. Ebenso wird durch die Sicherstellung korrekter Symmetrie auf der linken Seite des Musters der unempfindliche Einfluss der Neigung des Ausgangssignals auf die Koordinatenachse ausgeglichen.
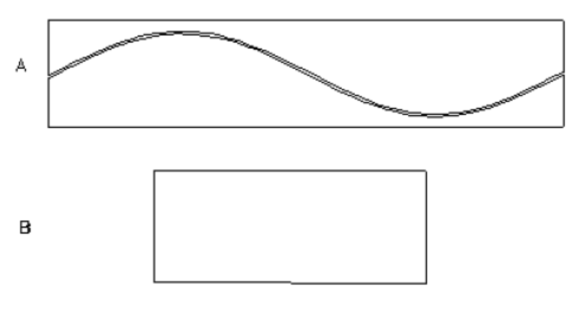
Durch das Neigen der Empfängerplatine des Rechteckwellenempfängers im Grobmodus (Abbildung 3B) um die Achse parallel zur Bewegungsachse wird die Balance zwischen dem oberen und unteren Teil des Senders beeinflusst. Dies wirkt sich wiederum auf die Balance der Sinus- und Kosinusausgänge aus. Um diesen Einfluss zu minimieren, wurde die in Abbildung 5 dargestellte Strategie angewendet. Dabei wurden die vertikalen Balken der Sinus- und Kosinusförderer gespiegelt und auf die Mittellinie bezogen, sodass zwei aufeinanderfolgende vertikale Balken als Kompensation dienten.
3. Ein Zeitraum und seine Auswirkungen
Über einen gewissen Zeitraum ist ein optisches System nicht geeignet, um präzise wiederkehrende Muster zu erzeugen. Dies liegt daran, dass die Genauigkeit des erzeugten Sinuswellenmusters zumindest durch den nichtlinearen Graustufenwert des Bildmediums begrenzt ist. Prinzipiell lässt sich diese Einschränkung durch die Erzeugung von Sinuswellen mit zwei Pegeln und die Modulationsapproximation der Pulsbreite umgehen, jedoch wird der Abbildungsmodus dadurch stark beansprucht, da die Gleichmäßigkeit der Darstellung und Reaktion darauf erheblich beeinträchtigt wird. Verschiedene Randbedingungen begrenzen die Periodenlänge des durch Beugung erzeugten Sinuswellenmusters.
Der elektrostatische Bereich unterliegt verschiedenen Regeln und kann in jedem Zyklus erzeugt werden. In einem Plattenkondensator ist das elektrische Feld homogen. Zusätzlich zum Randbauelement, das den Rand bildet, wird dieses kleiner, da sich das Verhältnis zur Plattengröße verringert. Daher kann ein Plattenkondensator keine Bauteile enthalten, die kleiner als separate Platinen sind, und die Mode im elektrischen Feld ist eher durch ihre Länge begrenzt als durch die Verkürzung des Zyklus.
Ein diffraktiver optischer Encoder liefert eine Sinuswelle, die theoretisch unendlich weit eingeschoben werden könnte. In der Praxis begrenzen jedoch folgende Nachteile die Einschießtiefe:
Gleichstrom-Offset,
Amplitudenabweichung,
Obertöne von Legierungen
Dies deutet darauf hin, dass die Ausgabe von Sinus- und Kosinuswellen einen Fehler verursachen kann, der sich einmal pro Zyklus (elektrischer Zyklus) wiederholt. Eine Amplitudenabweichung führt hingegen zu einem Fehler, der sich zweimal pro Zyklus wiederholt. Trotz dieser Fehler lassen sich harmonische Verzerrungen bis zu einem gewissen Grad kompensieren. Der Sinus-Kosinus-Signalfluss wird in zwei separaten Fotodioden und Thermometern erzeugt, die innerhalb eines begrenzten Temperaturbereichs betrieben werden können. Aufgrund der kurzen Betriebsdauer des optischen Encoders wird dennoch eine hohe Genauigkeit und Auflösung erzielt, und die oben genannte Unvollständigkeit ist lediglich als Teilfehler zu betrachten.
Elektrische Linear-Encoder unterscheiden sich in einigen Aspekten von optischen Encodern. Der größte Unterschied liegt in der Periodenlänge, die um Größenordnungen länger ist (Fem-Miller gegenüber Fem-Mikrometern). Um eine mit der optischer Encoder vergleichbare Auflösung zu erreichen, ist ein deutlich höherer Interpolationsfaktor (Quantisierungstiefe) erforderlich, und die sinusförmigen Ausgänge des elektrischen Encoders müssen wesentlich genauer sein. Glücklicherweise ermöglichen die folgenden Faktoren dies:
Die Qualität der Sende- und Empfangsplatinen hängt von einem von Natur aus präzisen fotografischen Produktionsprozess ab.
Der Randeffekt spielt eine positive Rolle, indem er die harmonische Verzerrung reduziert – im Bereich hoher Dämpfung im Sinuswellenbereich.
Die Größe des Interaktionsbereichs zwischen Lesekopf und Skala ist flexibel. Die Länge des Lesekopfes kann je nach Anwendung maximiert werden, indem viele Zyklen gleichmäßig unterteilt und die Genauigkeit verbessert wird.
Vor der Demodulation wird das Ausgangssignal simuliert und nutzt eine gemeinsame Empfangsplatine und einen gemeinsamen Verarbeitungskanal, sodass es hinsichtlich Gleichstromvorspannung, Amplitudenanpassung, harmonischer Verzerrung und Signal-Rausch-Verhältnis nahezu ideal ist und zudem bei einer bestimmten Temperatur stabil ist.
Langfristige praktische Hinweise und zugehörige niedrige Signalfrequenzen sind:
Eine Positionsindexierung ist nicht erforderlich, und selbst bei Vorhandensein eines mechanischen Anschlags mit guter Anpassungsfähigkeit ist der kontrollierte Verfahrweg in der inkrementellen Version ausreichend, um den Endzeitpunkt zu ermitteln, der sich aus der absoluten Position bestimmen lässt.
Reduzierung dynamischer Fehler und parasitärer Phasenänderungen
Die Abtastrate sollte reduziert werden, wenn im Hochgeschwindigkeitsregelkreis keine Fehler auftreten.
Reduziert benachbarte empfindliche PWM-Interferenzen und belegt einen separaten Spektralbereich.
Grundsätzlich besteht kein Konflikt zwischen der Autobahn und der Resolution – wie unten dargestellt.
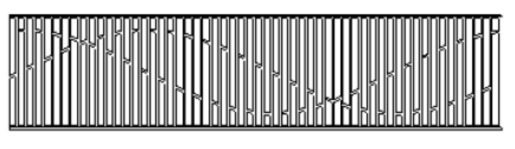
Für eine höhere Genauigkeit ist es erforderlich, die Ansprechzeit eines guten Kanals auf einer Skala gegenüber einem groben Kanal zu erhöhen. Das heißt, je länger die Skala, desto kürzer die Ansprechzeit eines guten Kanals. Um diese Anforderung zu reduzieren, werden die in Abbildung 6 schematisch dargestellten Änderungen minimiert, indem mehrere Zyklen grober Muster entlang der Skalenlänge eingefügt werden. Um Messfehler zu vermeiden, werden deren Amplituden linear moduliert. Die Positionen, die von der Anzahl der Sinus-Kosinus-Muster abhängen, werden berechnet und zur Identifizierung der Zyklen grober Muster verwendet. Die Bedeutung der Vektoren hängt jedoch auch von der Differenz zwischen Lesekopf und Skala ab, was zu erheblichen Fehlern führen kann. Dieser Fehler wird dadurch kompensiert, dass die Bedeutung eines Vektors eines guten Kanals während der gesamten Messdauer für einen bestimmten Spalt erhalten bleibt. Daher kann das Signal im groben Modus zur Spaltmessung und Signalkorrektur verwendet werden.
Figure 6 Amplitudenmodulation des rauen Modus
4. Signal-Rausch-Verhältnis
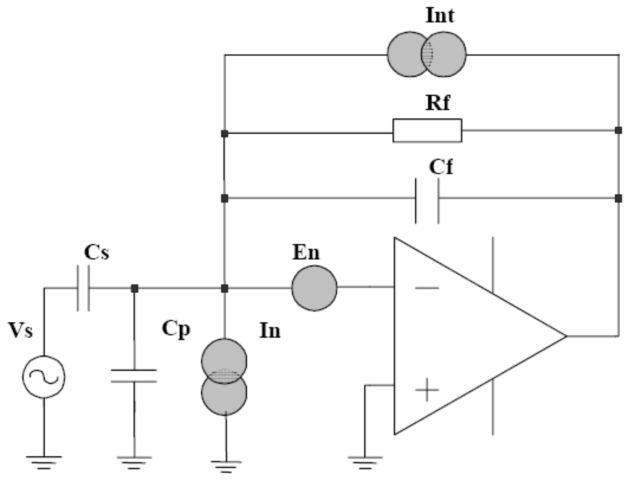
Das Rauschmodell des linearen elektrischen Encoders ist in Abbildung 7 dargestellt. Cf = 10 pF ist die Rückkopplungskapazität des Koeffizientenverstärkers, Cs die Kapazität der Empfangsplatine und Cp deren parasitäre Kapazität zur dahinterliegenden Masseebene. Bei einem Lesekopf von 25 × 60 mm beträgt die Fläche der Empfangsplatine mit guter Sinuswellenausbreitung 7 cm². Der optimierte Abstand zwischen Empfänger- und Senderplatine beträgt 4 mm, wobei dieser Abstand aufgrund der Periodenlänge als 1 mm angenommen wird, woraus sich C = 5 pF ergibt. Die verdeckte Platine ist eine innere Lage einer Leiterplatte mit einem Isolationsfaktor von 4.5. Der Abstand zum Glasfaser-Epoxidharz beträgt üblicherweise 0.5 mm, woraus sich Cp = 45 pF ergibt.
Abbildung 7 Das Rauschmodell des linearen elektrischen Encoders
Die Hauptrauschquelle befindet sich in den frühen Stufen des Kostenverstärkers. Die Spannungsaufnahme eines idealen Kostenverstärkers beträgt -C/Cf- und ergibt sich aus dem Verhältnis von Kapazität zu Rückkopplungskapazität, wobei ein unendlich hoher Rückkopplungswiderstand angenommen wird. In der Praxis wird ein 10-MΩ-Widerstand verwendet, dessen effektiver Wert durch die Bereitstellung seiner Ausgangsspannung (nicht dargestellt) über einen Spannungsteiler erhöht wird, wodurch sein Einfluss auf den Frequenzgang vernachlässigbar wird.
Die gesamte Rauschdichte der Verstärkerausgangsspannung kann bei [2], [3] ermittelt werden.
4kT/Rf (in Abbildung 7) ist das Johnson-Rauschen des Rückkopplungswiderstands, wobei k = 1.38 × 10⁻²³ und T = 300 °C. Der Gesamtwert für Rf = 10 MΩ beträgt 1.6 × 10⁻²⁷ A²/Hz. In Abschnitt 2 befindet sich eine FET-Eingangsstufe mit einem typischen Rauschen der Größenordnung 10⁻²⁸ A²/Hz, das im Vergleich zum thermischen Rauschen vernachlässigbar ist – der Betrieb mit einer Frequenz von 10 kHz führt zu einer Ausgangsrauschdichte von 4 × 10⁻¹⁵ V²/Hz.
Bei einem Verstärker und einem oberen Kondensator mit einer Spannungsrauschquelle von en = 10 nV/√Hz beträgt die Rauschdichte der zweiten Rauschquelle 3.6 × 10⁻¹⁵ V²/Hz. Die gewünschte Gesamtrauschdichte am Ausgang bei 10 kHz beträgt 8 × 10⁻¹⁵ V²/Hz.
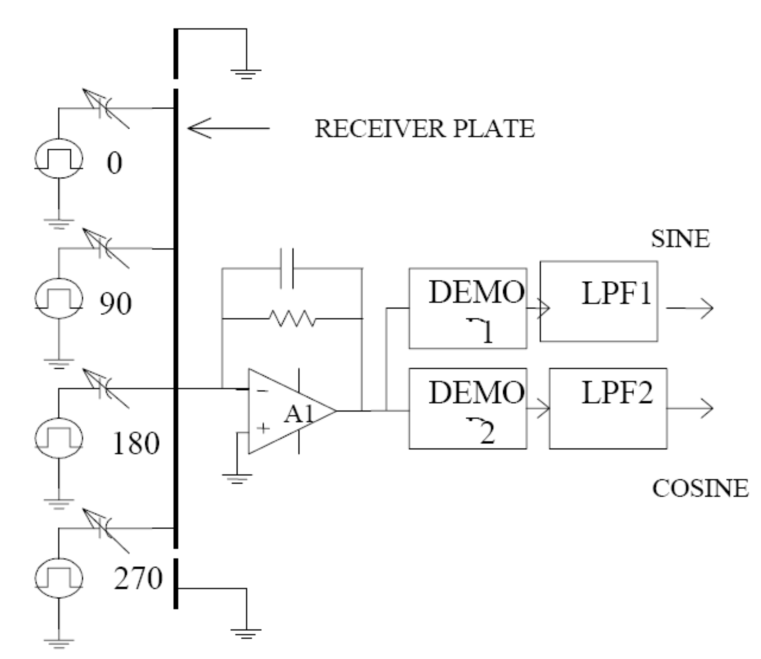
Wenn die Grenzfrequenz des Tiefpassfilters in Abbildung 2 (die gleichzeitig die Bandbreite des Encoder-Ausgangssignals ist) f0 beträgt, liegt das vom Verstärker ausgegebene Amplitudenmodulationssignal im Frequenzbereich fc ± f0. Rauschen im Frequenzbereich von 2f0 wird bei synchroner Demodulation in den Basisbandbereich überführt, wodurch die Auflösungsgrenze des Sensors festgelegt wird. Die Rauschbandbreite beträgt bei f0 = 1 kHz 2 kHz, und das Effektivrauschen vor dem Verstärker liegt bei 4 μV.
Wenn die Trägerwelle eine Rechteckwelle ist, muss zusätzlich ein Rauschbeitrag im Intervall zwischen der dritten und fünften Harmonischen berücksichtigt werden. Aufgrund der Reduzierung und des geringeren Beitrags des thermischen Rauschens ist der zusätzliche Rauschbeitrag in den jeweiligen (1/3 und 1/5, basierend auf Fourier-Koeffizienten) synchronen Demodulatoren jedoch vernachlässigbar.
Die Ausgangssignalspannung des Leistungsverstärkers beträgt Vs Cs/Cf und beträgt bei einer Spitze-Spitze-Anregungsspannung Vs = 5 V 2.5 V. Der maximale Signalwert des Modems (Vollwellenkorrektur) beträgt 1.25 V, und sein Rauschverhältnis zum Effektivwert beträgt 3 × 105⁵.
Bekanntermaßen überschreitet Gaußsches Rauschen das 3.3-Fache seines Effektivwertes, wobei die Effektivzeit nur 0.1 % beträgt. Tatsächlich kann es niemals das Vierfache seines Effektivwertes überschreiten. Dasselbe gilt für dynamische Zufallssignale, die bedenkenlos als 3/4 × 10⁻⁵⁷ × 10⁴, also 16 Bit, behandelt werden können.
4. Elektrische Schnittstelle, Signalverarbeitung, Auflösung, Geschwindigkeit
Der Linear-Encoder hat einen Stromverbrauch von 5 mA und benötigt eine primäre Gleichspannungsversorgung von +5 V. Dieser ungewöhnlich niedrige Stromverbrauch ist auf die geringe Last der Kondensatoren, die niedrige Anregungsfrequenz (10 kHz) und die CMOS-Prozessorschaltungen zurückzuführen.
Die Ausgangssignale von Sinus und Kosinus weisen üblicherweise eine Amplitude von 2 V Spitze-Spitze auf, wobei sich die Signale unterscheiden. Gleichzeitig wird das Gleichtaktrauschen auf ein komplementäres Signalpaar reduziert. Nach der Digitalisierung der Differenzsignale erfolgt die Umwandlung in digitale Signale. Der Umwandlungsalgorithmus basiert auf einer Tangententabelle. Dies beruht auf der Tatsache, dass alle Sinuswellenformen acht Reflexionen und/oder wiederholte Transformationen desselben Musters enthalten. Dies kann in der binären Winkeldarstellung als zusätzliche 3 Bit (das erste Bit repräsentiert 180°) für den berechneten Winkel ausgegeben werden. Ein n-Bit-A/D-Wandler stellt n-2 Hilfsbits bereit (ohne Flag-Bits und LSB). Für die Ausgabe der binären Winkelauflösung werden n+1 Bit benötigt. Alle Umwandlungsalgorithmen basieren auf [4].
Demnach wird eine Skala von 4 Millimetern pro Zyklus mit einem 12-Bit-A/D-Wandler kombiniert, was eine Auflösung von 4/213 mm bzw. 0.5 μm ergibt. Ein 14-Bit-A/D-Wandler hingegen bietet eine Auflösung von 0.1 μm.
Die maximale Lesekopfgeschwindigkeit eines Filters mit einer Grenzfrequenz von 1 kHz und einer Teilung von 4 mm beträgt 4 m/s – unabhängig von der spezifizierten Auflösung. Bekanntermaßen verbessert eine höhere Ansteuerspannung das Signal-Rausch-Verhältnis und ermöglicht komplexere Protokolle, während eine Erhöhung der Anregungsfrequenz und der Grenzfrequenz des Filters praktisch unbegrenzte Geschwindigkeiten ermöglicht.
5. Konstruktion und Genauigkeit
Die Skala und die unterste Schicht des Lesekopfes werden in Standard-Leiterplattentechnologie gefertigt. Die Dicke der Skala variiert zwischen 0.2 und 0.5 Millimetern, während frühere Standardabstände 1, 24 oder 8 Millimeter betrugen. Die Standardbreite der Skala liegt bei 25 oder 10 Millimetern. Der zugehörige Lesekopf – inklusive aller verarbeitenden Elektronen mit einer Länge von 6 Millimetern – ist ein Segment von 60 bzw. 40 Millimetern.
Die aktuelle Technologie ermöglicht eine minimale störende Anfangslänge von etwa 0.5 Millimetern und eine Genauigkeit der gefertigten Modelle im Mikrometerbereich, die mit der neuen Laser-Direktbildgebungstechnologie (LDI) erzielt wird. Die Gesamtgenauigkeit des Encoders wird jedoch von mehreren anderen Faktoren beeinflusst:
Der Durchschnitt vieler Zyklen,
Die Abschwächung höherer Harmonischer im Modus erzeugt Verzierungen vor Ort.
Der Grad der mechanischen Veränderungen in gedruckten Schaltungen entspricht weitgehend der Darstellung von Kupferplatten.
Die Messgenauigkeit beträgt üblicherweise 10 μM oder besser, abhängig von der Länge des Lineals.
6. Umweltverträglichkeit
Die Produkte elektrischer Linear-Encoder zeichnen sich durch ihre hohe Stabilität gegenüber verschiedenen Faktoren wie Temperatur, Luftfeuchtigkeit, Verschmutzung, mechanischen Vibrationen und elektrischen Störungen aus. Dies ist auf mehrere Faktoren zurückzuführen:
Großer Lesekopf und interaktiver Waagebereich,
Symmetrische geometrische Struktur des Empfängermodus,
Schmalbandiges Ausgangssignal,
Die Temperatur im Verarbeitungsschaltkreis variiert, ebenso wie der Spalt zwischen den Messpunkten, was sich gleichermaßen auf die Sinus- und Kosinussignale auswirkt – jedoch nicht auf deren Verhältnis. Daher ist der Betrieb des Encoders im Wesentlichen temperaturunabhängig. Der einzige nicht selbstkompensierte Temperatureinfluss ist die vertikale Ausdehnung der Skala. Bei einer Skala von 0.2 Millimetern Dicke lässt sich jedoch unter Berücksichtigung des Wärmeausdehnungskoeffizienten eine für alle Anwendungsfälle geeignete Ausdehnung bis zur Grundschicht finden. Dies ist in vielen Anwendungen optimal, da so eine Ausdehnungsdifferenz von null und eine Angleichung an andere Maschinenelemente gewährleistet wird. Im praktischen Einsatz sollte die Wärmeausdehnung minimiert und die Skala eine stabile Grundfläche erreichen.
Der elektrische Linear-Encoder wird durch Staubablagerungen kaum beeinträchtigt, da er gleichmäßig in einer großen Interaktionsfläche verteilt ist. Die Auswirkungen von Staub und Supermarktablagerungen überwiegen den zunehmenden Luftspalt bei Weitem.
Der elektrische Linear-Encoder ist von Natur aus unempfindlich gegenüber Magnetfeldern. Da der Bereich, in dem die Empfängerplatine angebracht ist, elektrisch abgeschirmt ist, ist dies auch auf den Skalenelementen vermerkt.
7. Drahtloser Lesekopf und andere elektrische Encoder
Eine weitere Version des elektrischen Linear-Encoders befindet sich in Entwicklung. Sie verfügt über zwei einander gegenüberliegende Skalen, von denen eine als Förderband und die andere als Empfänger dient. Bei Bewegung auf einer festen Skala werden grobe und gute Signale erzeugt und die Leseköpfe isolierter Platinen angesteuert.
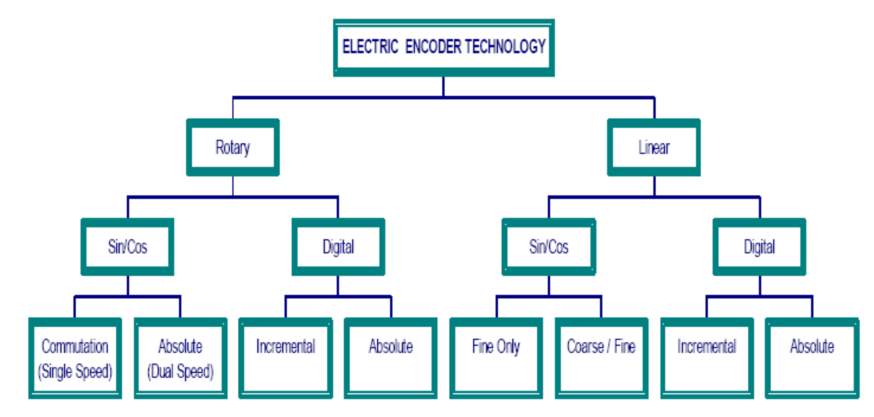
Neben linearen Encodern werden neuartige elektrische Sensoren mit empfindlicher Technologie eingesetzt, um Encoder mit ähnlichen, ungewöhnlichen Eigenschaften zu nutzen. Abbildung 8 zeigt die verschiedenen Varianten. Die digitale Version wird digitalisiert, um die Erfassung des analogen Ausgangssignals zu ermöglichen und das gewünschte Ausgabeformat zu erzeugen.
Figure 8 Eine Version eines elektrischen Positionssensors
Ostbrücke basiert auf dem Markt in China und Europa, um unseren Kunden originelle Produkte anzubieten. HEIDENHAIN, PRECIZIKA, SIEMENS, B & R, BOSCH REXROTH, EATON VICKERS, PARKER,, Großer Lagerbestand, Mindestbestellmenge akzeptiert, schnelle Lieferung. Wenn Sie in den Bereichen Präzisionsbewegungssteuerung, elektronische Steuerung, Automatisierung und Hydrauliksysteme tätig sind, ist das OstBridge-Team die beste Wahl, um die passende Lösung für Sie zu finden.